
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

स्टेपर मोटर्स आणि सर्वो आणि सर्वो मोटर्समधील फरक समजून घेण्यासाठी एक लेख
I. स्टेपर मोटर्स आणि सर्वो आणि सर्वो मोटर्समधील फरक
स्टेपर मोटर: हे ओपन-लूप कंट्रोल एलिमेंट स्टेपर मोटर पार्ट्सचे कोनीय विस्थापन किंवा लाइन डिस्प्लेसमेंटमध्ये इलेक्ट्रिकल पल्स सिग्नल आहे. सोप्या भाषेत सांगायचे तर, कोन आणि वळणांची संख्या नियंत्रित करण्यासाठी ते इलेक्ट्रिकल पल्स सिग्नलवर अवलंबून असते. त्यामुळे किती रोटेशन आहे हे ठरवण्यासाठी तो फक्त पल्स सिग्नलवर अवलंबून असतो. कोणताही सेन्सर नसल्यामुळे, थांबण्याचा कोन विचलित होऊ शकतो. तथापि, अचूक पल्स सिग्नल विचलन कमी करते.
सर्वो मोटर: मोटरचा वेग नियंत्रित करण्यासाठी सर्वो कंट्रोल सर्किटवर अवलंबून रहा, रोटेशन स्थिती नियंत्रित करण्यासाठी सेन्सरद्वारे. त्यामुळे स्थिती नियंत्रण अतिशय अचूक आहे. आणि घूर्णन गती देखील परिवर्तनीय आहे.
सर्वो (इलेक्ट्रॉनिक सर्वो): सर्वोचा मुख्य घटक सर्वो मोटर आहे. यात सर्वो मोटर कंट्रोल सर्किट + रिडक्शन गियर सेट आहे. अरे हो, सर्वो मोटरमध्ये रिडक्शन गियर सेट नाही. आणि सर्वोमध्ये रिडक्शन गियर सेट आहे.
लिमिट सर्वोच्या बाबतीत, रडर आर्मचा स्टीयरिंग कोन निर्धारित करण्यासाठी ते आउटपुट शाफ्टच्या खाली असलेल्या पोटेंशियोमीटरवर अवलंबून असते. सर्वो सिग्नल कंट्रोल हे पल्स विड्थ मॉड्युलेटेड (PWM) सिग्नल आहे, जेथे मायक्रोकंट्रोलर सहजपणे हा सिग्नल तयार करू शकतो.
II. स्टेपर मोटर मूलभूत तत्त्व
ते कसे कार्य करते:
सामान्यत: मोटरचा रोटर हा कायम चुंबक असतो आणि जेव्हा स्टेटर विंडिंग्समधून विद्युतप्रवाह वाहतो तेव्हा स्टेटर विंडिंग्स वेक्टर चुंबकीय क्षेत्र तयार करतात. हे चुंबकीय क्षेत्र रोटरला कोनातून फिरवण्यास चालवेल, जेणेकरून रोटरच्या चुंबकीय क्षेत्राच्या जोडीची दिशा स्टेटरच्या चुंबकीय क्षेत्राच्या दिशेप्रमाणेच असेल. जेव्हा स्टेटरचे वेक्टर चुंबकीय क्षेत्र एका कोनाने फिरते. रोटर देखील या चुंबकीय क्षेत्रासह एका कोनाने फिरतो. प्रत्येक इनपुट इलेक्ट्रिकल पल्ससाठी, मोटर एक टोकदार पाऊल पुढे फिरवते. त्याचे आउटपुट कोनीय विस्थापन इनपुट डाळींच्या संख्येच्या प्रमाणात असते आणि त्याची घूर्णन गती डाळींच्या वारंवारतेच्या प्रमाणात असते. ज्या क्रमाने विंडिंगला ऊर्जा मिळते तो क्रम बदलून, मोटर उलटते. म्हणून, स्टेपर मोटरच्या रोटेशनवर नियंत्रण ठेवण्यासाठी डाळींची संख्या आणि वारंवारता आणि मोटरच्या प्रत्येक टप्प्याच्या विंडिंगला उर्जा देण्याचा क्रम नियंत्रित केला जाऊ शकतो.
उष्णता निर्मितीचे तत्व:
सामान्यतः सर्व प्रकारच्या मोटर्स पहा, अंतर्गत लोखंडी कोर आणि वळण कॉइल असतात. विंडिंग रेझिस्टन्स, पॉवर नुकसान, तोटा आकार आणि प्रतिकार निर्माण करेल आणि प्रवाह स्क्वेअरच्या प्रमाणात आहे, ज्याला बर्याचदा तांबे नुकसान म्हणून संबोधले जाते, जर प्रवाह मानक डीसी किंवा साइन वेव्ह नसेल तर, हार्मोनिक नुकसान देखील निर्माण करेल; कोरमध्ये हिस्टेरेसिस एडी करंट इफेक्ट आहे, पर्यायी चुंबकीय क्षेत्रामध्ये देखील तोटा निर्माण होईल, सामग्रीचा आकार, वर्तमान, वारंवारता, व्होल्टेज संबंधित, ज्याला लोह नुकसान म्हणतात. तांब्याचे नुकसान आणि लोखंडाचे नुकसान उष्णता निर्मितीच्या स्वरूपात प्रकट होईल, त्यामुळे मोटरच्या कार्यक्षमतेवर परिणाम होईल. स्टेपिंग मोटर सामान्यत: स्थिती अचूकता आणि टॉर्क आउटपुटचा पाठपुरावा करते, कार्यक्षमता तुलनेने कमी असते, करंट सामान्यतः मोठा असतो आणि हार्मोनिक घटक जास्त असतात, प्रवाहाची वारंवारता वेग आणि बदलानुसार बदलते, म्हणून स्टेपिंग मोटर्समध्ये सामान्यतः उष्णता असते आणि परिस्थिती सामान्य AC मोटरपेक्षा अधिक गंभीर असते.
III. रुडर बांधकाम
सर्वो मुख्यत्वे हाऊसिंग, सर्किट बोर्ड, ड्राईव्ह मोटर, गियर रिड्यूसर आणि पोझिशन डिटेक्शन एलिमेंटने बनलेला असतो. त्याचे कार्य तत्त्व असे आहे की रिसीव्हर सर्वोला सिग्नल पाठवतो, आणि सर्किट बोर्डवरील IC कोरलेस मोटरला फिरवण्यास चालवितो आणि रिडक्शन गियरद्वारे स्विंग आर्ममध्ये पॉवर प्रसारित केली जाते आणि त्याच वेळी, पोझिशन डिटेक्टर पोझिशनिंगवर आला आहे की नाही हे निर्धारित करण्यासाठी सिग्नल परत पाठवतो. पोझिशन डिटेक्टर हा एक व्हेरिएबल रेझिस्टर आहे. सर्वो फिरते तेव्हा, रोधक मूल्य त्यानुसार बदलेल, आणि रोटेशनचे कोन रेझिस्टर मूल्य शोधून ओळखले जाऊ शकते. जनरल सर्वो मोटर ही तीन-ध्रुव रोटरभोवती गुंडाळलेली एक पातळ तांब्याची तार असते, जेव्हा कॉइलमधून विद्युतप्रवाह वाहते तेव्हा चुंबकीय क्षेत्र निर्माण होते आणि रोटर चुंबकाचा परिघ प्रतिकर्षण निर्माण करतो, ज्यामुळे रोटेशनची शक्ती निर्माण होते. भौतिकशास्त्रानुसार, एखाद्या वस्तूच्या जडत्वाचा क्षण त्याच्या वस्तुमानाच्या थेट प्रमाणात असतो, म्हणून फिरवल्या जाणाऱ्या वस्तूचे वस्तुमान जितके जास्त तितके जास्त बल आवश्यक असते. जलद रोटेशन गती आणि कमी उर्जा वापरण्यासाठी, सर्वो पातळ तांब्याच्या तारांपासून बनविलेले आहे आणि अतिशय पातळ पोकळ सिलेंडरमध्ये वळवले जाते, ज्यामध्ये कोणतेही खांब नसलेले अतिशय हलके पोकळ रोटर तयार केले जाते आणि सिलेंडरच्या आत मॅग्नेट ठेवले जातात, जे पोकळ कप मोटर आहे.
वेगवेगळ्या कामकाजाच्या वातावरणास अनुकूल करण्यासाठी, वॉटरप्रूफ आणि डस्टप्रूफ डिझाइनसह सर्वोस आहेत; आणि वेगवेगळ्या लोड आवश्यकतांच्या प्रतिसादात, सर्व्होसाठी प्लास्टिक आणि धातूचे गीअर्स आहेत आणि सर्व्होसाठी मेटल गीअर्स सामान्यत: उच्च-टॉर्क आणि हाय-स्पीड असतात, ज्याचा फायदा जास्त भारांमुळे गीअर्स चिप केला जाणार नाही. रोटेशन जलद आणि अधिक अचूक करण्यासाठी उच्च दर्जाचे सर्वो बॉल बेअरिंगसह सुसज्ज असतील. एक बॉल बेअरिंग आणि दोन बॉल बेअरिंगमध्ये फरक आहे, अर्थातच दोन बॉल बेअरिंग अधिक चांगले आहेत. नवीन FET सर्वो मुख्यत्वे FET (फील्ड इफेक्ट ट्रान्झिस्टर) वापरत आहेत, ज्याचा फायदा कमी अंतर्गत प्रतिकार आणि त्यामुळे सामान्य ट्रान्झिस्टरच्या तुलनेत कमी वर्तमान नुकसान आहे.
IV. ऑपरेशनचे सर्वो सिद्धांत
बायस व्होल्टेज निर्माण करण्यासाठी अंतर्गत सर्किटमध्ये pwm वेव्हमधून, कंटॅक्टर जनरेटर रिडक्शन गीअरद्वारे पोटेंटिओमीटर चालविण्यास चालवितो, जेणेकरून जेव्हा व्होल्टेजचा फरक शून्य असेल तेव्हा मोटर थांबते, जेणेकरून सर्वोचा प्रभाव साध्य होईल.
सर्वो PWM साठी प्रोटोकॉल सर्व समान आहेत, परंतु दिसण्यासाठी नवीनतम सर्व्हो भिन्न असू शकतात.
प्रोटोकॉल सामान्यतः आहे: वेगवेगळ्या कोनातून फिरण्यासाठी सर्वो नियंत्रित करण्यासाठी 0.5ms ~ 2.5ms मध्ये उच्च पातळीची रुंदी.
V. सर्वो मोटर्स कसे कार्य करतात
खालील आकृती पॉवर ऑपरेशनल ॲम्प्लिफायर LM675 सह बनवलेले सर्वो मोटर कंट्रोल सर्किट दाखवते आणि मोटर ही DC सर्वो मोटर आहे. आकृतीवरून पाहिल्याप्रमाणे, पॉवर ऑपरेशनल ॲम्प्लीफायर LM675 15V द्वारे पुरवले जाते, आणि 15V व्होल्टेज ऑपरेशनल ॲम्प्लिफायर LM675 च्या इन-फेज इनपुटमध्ये RP 1 द्वारे जोडले जाते आणि LM675 चे आउटपुट व्होल्टेज moservotor च्या इनपुटमध्ये जोडले जाते. मोटर गती रिअल-टाइम शोधण्यासाठी गती मापन सिग्नल जनरेटरसह सुसज्ज आहे. खरं तर, स्पीड सिग्नल जनरेटर हा एक प्रकारचा जनरेटर आहे आणि त्याचे आउटपुट व्होल्टेज रोटेशनल स्पीडच्या प्रमाणात आहे. स्पीड मेजरिंग सिग्नल जनरेटर G मधून व्होल्टेज आउटपुट व्होल्टेज डिव्हायडर सर्किटनंतर स्पीड एरर सिग्नल म्हणून ऑपरेशनल ॲम्प्लिफायरच्या इनव्हर्टिंग इनपुटला परत दिले जाते. स्पीड कमांड potentiometer RP1 द्वारे सेट केलेले व्होल्टेज मूल्य R1.R2 द्वारे व्होल्टेज विभाजनानंतर ऑपरेशनल ॲम्प्लिफायरच्या इन-फेज इनपुटमध्ये जोडले जाते, जे संदर्भ व्होल्टेजच्या समतुल्य आहे.
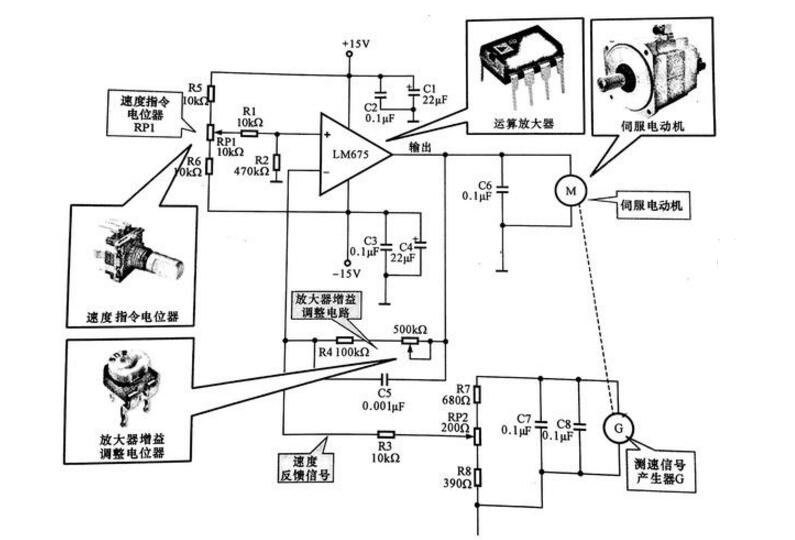
सर्वो मोटरची योजनाबद्ध नियंत्रण
सर्वोमोटर: सर्वोमोटरसाठी एम अक्षराने दर्शविलेले, ते ड्राइव्ह सिस्टमसाठी उर्जेचे स्त्रोत आहे. ऑपरेशनल ॲम्प्लीफायर: सर्किट नावाने दर्शविले जाते, म्हणजे, LM675, सर्वो कंट्रोल सर्किटमधील एक ॲम्प्लीफायर तुकडा आहे जो सर्वो मोटरसाठी ड्राइव्ह करंट प्रदान करतो.
स्पीड कमांड पोटेंशियोमीटर RP1: सर्किटमधील ऑपरेशनल ॲम्प्लीफायरचा संदर्भ व्होल्टेज सेट करते, म्हणजे स्पीड सेटिंग. ॲम्प्लीफायर गेन ऍडजस्टमेंट पोटेंशियोमीटर RP2: सर्किटमध्ये अनुक्रमे ॲम्प्लिफायर गेन आणि स्पीड फीडबॅक सिग्नलचा आकार फाइन-ट्यून करण्यासाठी वापरला जातो.
जेव्हा मोटरचा भार बदलतो, तेव्हा ऑपरेशनल ॲम्प्लिफायरच्या इनव्हर्टेड इनपुटला दिलेला व्होल्टेज देखील बदलतो, म्हणजे, जेव्हा मोटरचा भार वाढतो तेव्हा वेग कमी होतो आणि स्पीड सिग्नल जनरेटरचा आउटपुट व्होल्टेज देखील कमी होतो, ज्यामुळे ऑपरेशनल ॲम्प्लिफायरच्या इनव्हर्टेड इनपुटवरील व्होल्टेज आणि ऑपरेशनल ॲम्प्लीफायरमधील फरक कमी होतो. संदर्भ व्होल्टेज वाढते आणि ऑपरेशनल ॲम्प्लीफायरचे आउटपुट व्होल्टेज वाढते. याउलट, जेव्हा भार लहान होतो आणि मोटरचा वेग वाढतो, तेव्हा गती मोजणाऱ्या सिग्नल जनरेटरचे आउटपुट व्होल्टेज वाढते, ऑपरेशनल ॲम्प्लिफायरच्या इनव्हर्टेड इनपुटमध्ये जोडलेले फीडबॅक व्होल्टेज वाढते, या व्होल्टेज आणि रेफरन्स व्होल्टेजमधील फरक कमी होतो, आउटपुट व्होल्टेज कमी होते आणि ऑपरेशनल ॲम्प्लिफायरचे व्होल्टेज कमी होते. त्यानुसार, जेणेकरून घूर्णन गती आपोआप सेट मूल्यावर स्थिर केली जाऊ शकते.


